Autonomous micromobility
Project Idea Metadata
- Project Idea Name: Autonomous micromobility
- Date: 9/17/2025 8:34:13 PM
-
Administrators:
Project Idea Description
Acceptance of autonomous driving in Switzerland is undermined by a demand-offer mismatch and innovation’s role by definition is to unlock something not possible before instead of “doing it better”. Our project attempts to reinvent urban autonomous mobility addressing users comfort, mental ease and security with a new vehicle that integrates into future urban traffic reality.

USER MOBILITY DEMAND
First demand is to control and adapt your daily trip to your changing planning and leave time to work or rest. Setting multi-hop fragmented trip with multiple transport means is a stress of connections and constraints of dependence on others. Being able to start trip when you are ready or change it based on your updated planning or unpredictable events, while vehicle is at your disposal, contributes to your overall state of mental ease provoked by “power of now”. Also, daily trip contains a dozen of stops and being able to stop where it is most comfortable based on task at hand is more than welcome (it is not possible with cars, not so with scooters and ok with kick-scooters). At the end it is about your time and tension lost in planning and waiting connections during the day with public transport, shared fleet, covoiturage or robotaxis. So, vehicle should be at your instant disposal every moment of the day.
Second demand is about having a private space-time in which you can relax, think, be yourself, be “left alone”, prepare a day before the workday starts or after it ends. It should be respected, not interrupted by others and reasonably calm (at least with headphones). Space-wise, you do not need more than 0.5m3 around you for belongings, but prefer to have this sphere of influence under your control. Shared cars, public transport, allow to only temporarily maintain that space and add stress to “remove” it at the end of the trip.
Third demand is safety and responsibility in normal driving or A-driving. Being locked in a running closed body car that you do not control and that can be hacked presents a psychological strain and responsibility towards outside people and cars. So switching from “L0” to autonomous driving beyond level L4 is a barrier. However, you would agree to hand over some simple driving skills to a car like augmented cruise control while being in charge of the vehicle.
Fourth demand is cost which for shared means like Mobility, robotaxis or kick-scooters appear low for occasional use, but when applied daily does not fit into regular mobility budget. Additional demand would be compatibility with public transport especially trains where you would like to have a vehicle on the work-train and train-home sections of the trip.
To summarize, if you can spend less time and mental efforts on mobility skills, you would gain more mental ease. Whether autonomous driving could answer the demand is now an open discussion.
OFFER
Cars, motorcycles and kick-scooters were not thought for autonomous driving originally and mismatch the demand on several aspects of urban mobility.
Cars (autonomous or not) have two problems – their width and their length. Width occupies whole lane in traffic making overtaking impossible. It also prevents cars from stopping on road side without blocking the traffic or from temporarily park on sidewalk as there are anti-parking protections and not enough space. And, still, frequent stops to let people get on/off the vehicle or unload it is a basic mobility need.
Length requires a full parking place which is only available at geographically rare locations with complex access. Without capability to temporarily stop, parkings totally define the vehicle trajectory in cities and thus heavily constraint users behavior. If more people switch from public transport to A-driving, more people will go off the vehicles right in front of their work and cars have to drive through traffic again to rare parking places. This will or completely fill parkings in city center driving cost up. Or cars will park outside of the city essentially tripling the rush hour for trip to pick the person, do the trip and bring car back to parking and this twice a day. So, cars with their width and length are hostages of already dense traffic in Switzerland and more trafic caused by A-driving will create deadlocks. That is the reason why urban mobility is gradually becoming micromobility in cities with moderate compatibility with public transport.
Narrow vehicles (2-4 wheels) of the motorcycle class are not that autonomy compatible for stability reasons and need for a person to balance. Electric kick scooters and bicycles are not successful in autonomy for essentially the same reason. Another reason is that cost of autonomous functionality could double the price of an electric scooter which is beyond client’s acceptance.
Autonomous driving kit adds 8..12k to the car cost resulting the use of more high-end cars. For those who want to switch to autonomous mobility, this, in turn, drives the cost up. And high cost of trip raises expectations for promised gain. But if tangible experience of calm time, comfort and safety is not smooth because of the above, the rejection steps in.
Mobile robots in cleaning, delivery, patrolling, etc. will also claim their part of the traffic and fragment it replacing each truck with several smaller robots. Currently big car-size delivery robots have same issues with their width blocking traffic and drop-off zones. Small delivery robots are slow, unable to stand up if fallen on the side and not visible or agile in traffic. Autonomous driving should foresee mixed people/robotic traffic on the roads and less barriers between two worlds. Ideally, people and robots would share a same platform for micromobility.
Legal and regulations side. In case of accident, cars and scooters’ most dangerous outcomes is to project pedestrian on the floor provoking head injury and fatal outcome or rolling with 1-2 tons over areas of vital organs leading to same outcome. So, height of the bumper where impact occurs and weight of the existing vehicle directly contributes to safety concerns.
SOLUTION
In our project we would like to take courage and rethink autonomous driving in urban mobility by starting from reality of demands and not “lowering the acceptance barrier” for existing solutions. With respect to Autonomous Challenge we are mostly contributing on following chapters: 1) Technology and safety 3) Social and Ethical, 4) Infrastructure and Environment.
A) First contribution is to constrain form factor of a vehicle to be narrower, shorter and lower. It should fit into traffic and to bicycle lanes, can overtake and be overtaken in one lane. It should be able to park in a motorcycle parking slot, perpendicular to the sidewalk and between cars. It can go on sidewalk where more space is available and where cars can not go because of protections. Dividing width by 2 would double the traffic density and fluidity as narrow vehicle can stop for loading people and cargo without altering the traffic. Limiting vehicle length to motorcycle parking spot would allow 5 such vehicles to park in a single car parking place and densify parking capacity 5x. Therefore, vehicle fitting into 1x2m rectangle is necessary.
B) Comfort of use and security. Vehicle is stable and can not fall when you load luggage on it or step on the platform. It can be accessed from all four sides simplifying options to get on/off in constrained spaces and safety to to enter vehicle from sidewalk. It can recline at turns offering natural posture and removing a need to balance. When driving on slopes it can maintain platform horizontal. Waist support can transform into a small seat. Additional tissue protection could be used around the vehicle in winter. It can drive over small obstacles smoothly including the sidewalk. Private space is sufficient for two bags.
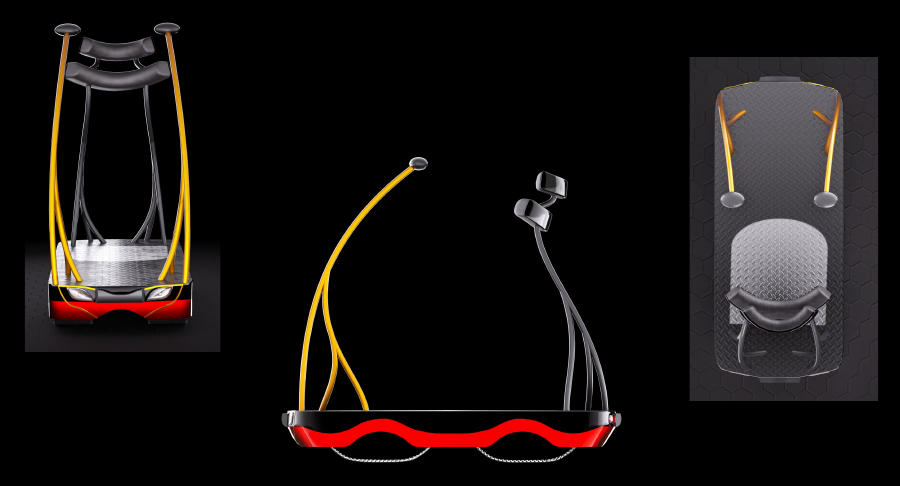
C) Vehicle should be always available ”on demand”. It should wait for you at home in the morning, come from nearby motorcycle parking spot in a minute when you need transport, bring you to destination and “disappear” instantly upon arrival going to another nearby motorcycle parking spot. Therefore, vehicle should be able to autonomously drive and park itself without a passenger and without risk of falling. Our vehicle offers this by compressing all technology below 30cm to obtain its center of gravity below 20cm combined with large contact surface. This also provides gains on Safety and Ethical side. Such vehicle with a bumper at 25cm, total weight with load below 200kg and running at 25km/h in case of direct impact will certainly hurt pedestrian below knees, but would not project pedestrian forward avoiding head injury. In case of rolling over the person it would not damage its internal organs because of low weight and large contact surface. Therefore, fatal or severe injuries are not possible increasing safety and removing many ethical concerns about responsibility in case of accident with autonomous vehicles. The fact that vehicle can not fall (user can only step from it) offers significant security feeling and stability to passenger. This open body does not reduce security as low center of gravity provides vehicle stability and metal poles protect from lateral impact. Stability advantages are quite beneficial to robotics systems.
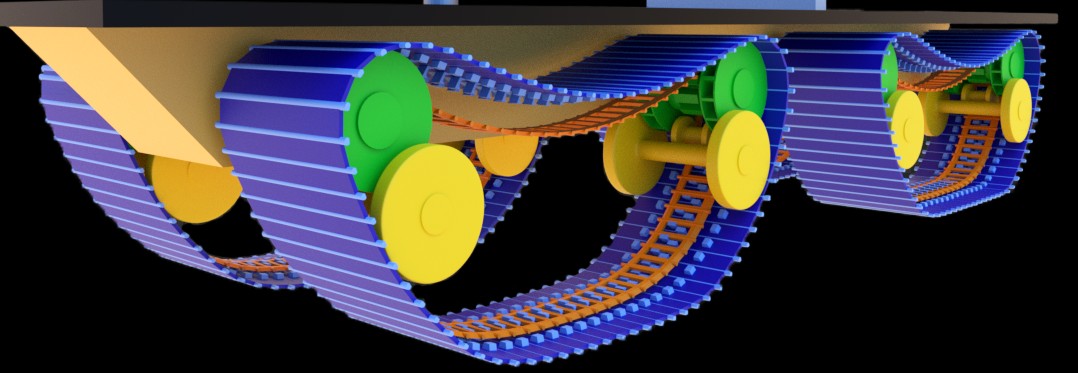
D) Levels of autonomy. There is a psychological factor and technology factor regarding level of autonomy and we advocate that lower levels of autonomy combined with certain vehicle behavior are more favorable to gradual acceptance of autonomous driving. 90% of autonomous system cost is in computational power dedicated to functionalities of localization and obstacle avoidance. If they are simplified, it will reduce cost. Our vehicle with its treads can actually roll over small obstacles of less than 4cm (stones, potholes, water grid, cables, etc.) without soliciting user or system attention. This means only big obstacles as cars, pedestrians or roadblocks have to be avoided. If done in autonomous system, it makes the algorithm computationally simpler and system cheaper. If vehicle rolls over small obstacles and driver is responsible for avoiding rare big obstacles (as a walking person holding smartphone on a street can spot obstacles with peripheral vision) the autonomy could be lowered to level L3. Our vehicle has also special trajectory following functionality based on road appearance at a speed of 25km/h limit.
On psychological side a “level leap” from being a driver (L0) to cede all the control to a car (L5) could be unbearable and stressful barrier for unprepared person. People who never had a driving license could embrace it. But people used to traffic situations and managing their complexity (at least drivers) still want to be in (partial) control of the vehicle if they become passengers.
Therefore we would advocate that autonomous driving acceptance should be started from a lower level and lower cost. Humans will tolerate and gain confidence into autonomous driving features if vehicle helps them to drive in simple and secure cases, but leave humans control critical situations. Lower cost of simpler autonomous system open access to mass demand and wider acceptance.
E) Ownership v.s. sharing (or leasing or renting). Use case clearly indicates that one vehicle will be attributed and following one person becoming its de facto property. Therefore, our vehicle is simplified to lower its cost to the minimum and pass under level of ownership acceptance. If cost remains high because of the options, then monthly renting is the solution. Therefore we think that vehicle will be neither owned, nor shared, but leased/rented to offer exclusive on-demand access, acceptable cost and provided maintenance.
F) On the environmental side the vehicle maximizes the payload-to-weight ratio thus consuming less possible energy which is even more critical to mobile robotics. Therefore, our vehicle is as minimalistic wrt to its functionality as possible and can transport two adults i.e. 150kg with expected weight of 120kg. This is achieved with open body vehicle.
To summarize, we and several consulted experts believe that urban autonomous mobility should be reinvented towards micromobility that addresses user’s demand for comfort, mental ease and security while integrating it into urban traffic reality.
PROJECT WORKPLAN
To answer the question if autonomous driving acceptance could be unlocked by suggested vehicle, several reasonable technical and use case explorations need to be performed
Tread digital simulations (in progress)
- Validate mechanical model with rubber, metal inserts, kevlar cables and locking mechanisms
- Confirm static forces, resistance, tension, torsion
- Evaluate cinematic forces, fatigue and wear-off at normal motion
- Evaluate forces at (de/ac)celerations, shocks, impact, cornering, inclination, potholes, obstacles
- 3D print one segment of the tread (physical)
Platform digital simulations
- Digitally simulate locomotion properties of platform with load
- Simulate how it can support standing person in different road scenarios including accidents
- Define guidance and how four motors control tread and subsequently platform maneuvers
- Stabilization control of platform horizontal orientation
Usability prototype
- Realize usability prototype (non-functioning standing platform)
- Test access to the platform from any side, loading luggage, access by kids
- Test standing person comfort and constraints